Ⅲー10
Ⅲー11
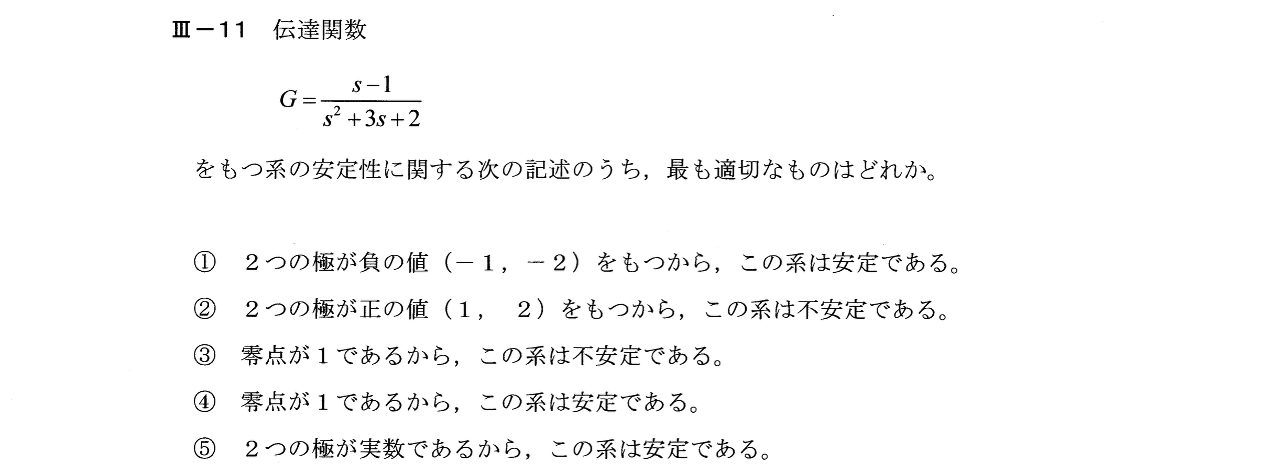
特性方程式は次式となる。
$$ s^2+3s+2 = (s+1)(s+2) = 0 $$
$$ s = -1, -2 $$
システムの安定性の条件は、すべての極の実部が負であることである。
今回求まった極 \(-1\) と \(-2\)はいずれも負の実数である。
したがって、この系は安定である。
【解答:①】
Ⅲー12
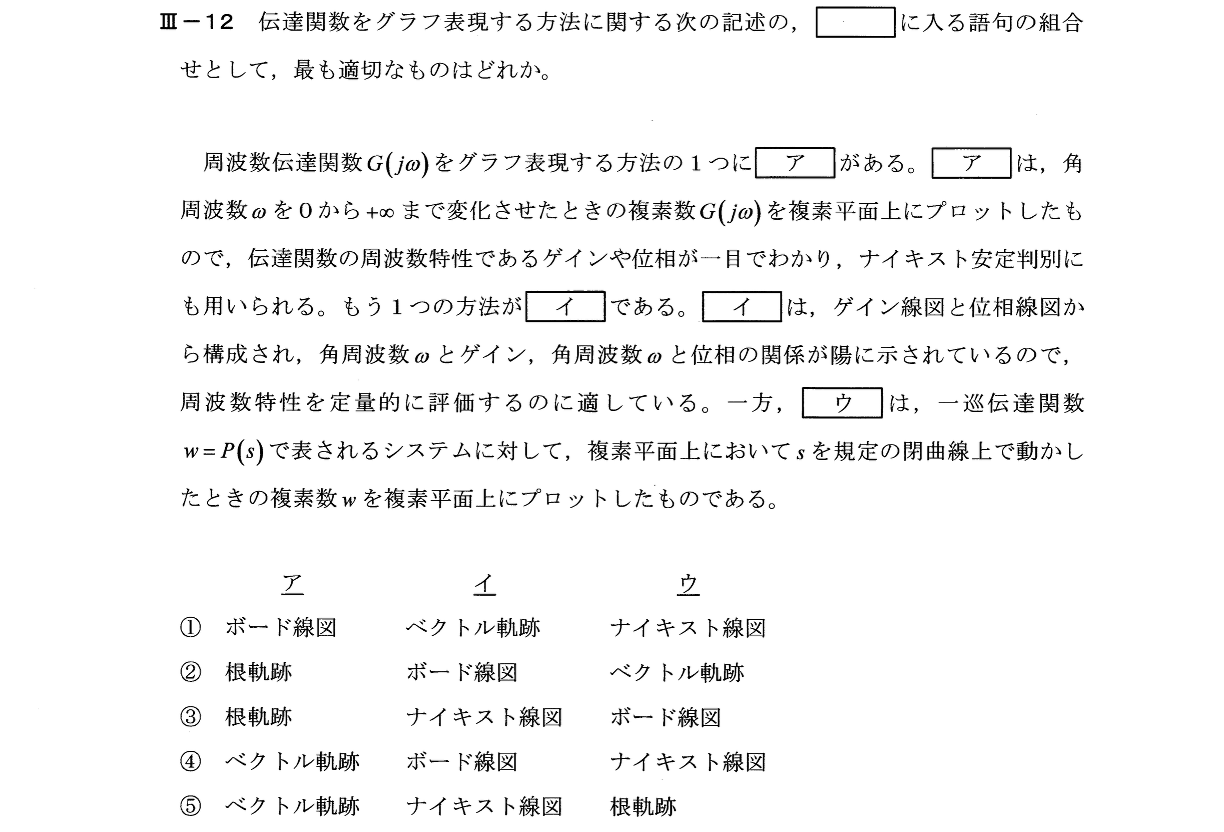
覚える。
【解答:④】
Ⅲー13
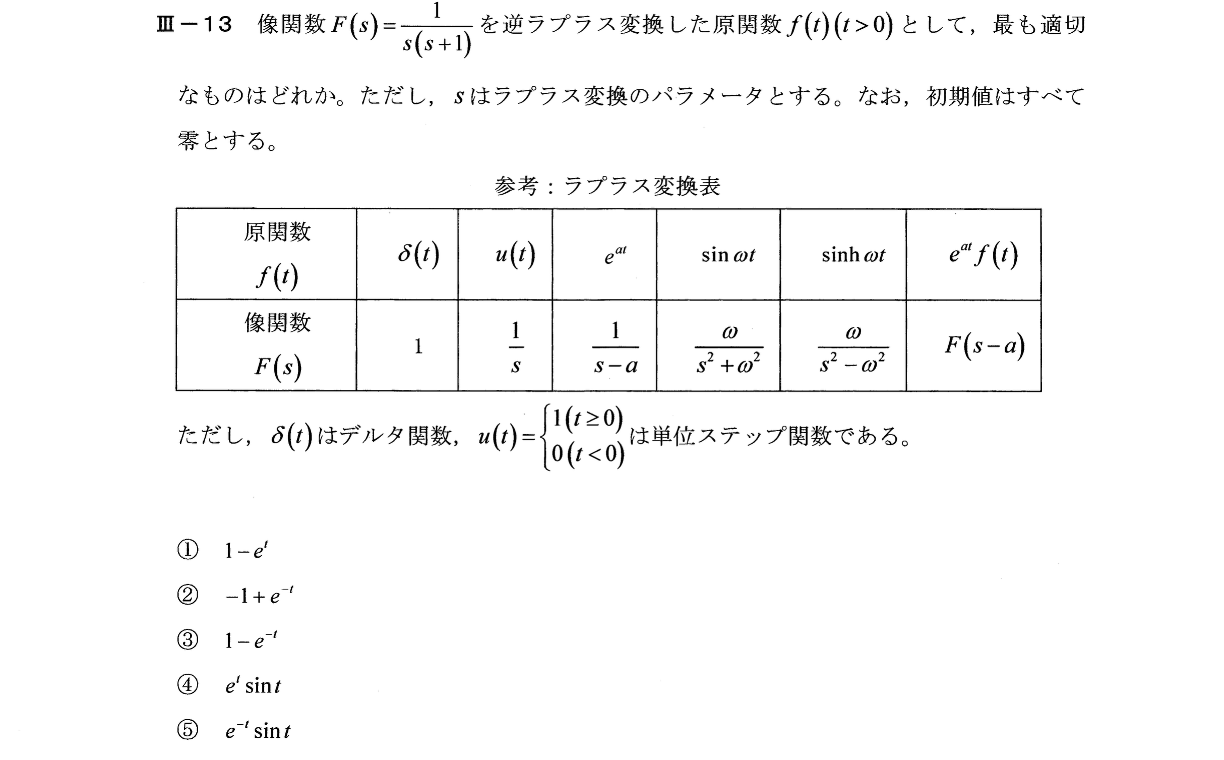
関数\(F(s)\)を逆ラプラス変換するために、部分分数分解を行う。
$$F(s) = \frac{1}{s} – \frac{1}{s+1}$$
したがって、原関数\(f(t)\)は、
$$f(t) = u(t) – e^{-t}$$
問題文の条件より、\(t>0\)においては \(u(t)=1\)であるため、
$$f(t) = 1 – e^{-t}$$
【解答:③】
Ⅲー14
制御量:制御対象に属し、目標値に一致させるべき量。肢1
操作量:制御の目的を達成するために、制御対象に加える入力。肢2
偏差:基準量(目標値)と制御量との差。肢3
定常値:制御系が安定した後の出力値。肢4
基準量:目標として外部から与えられる値。肢5
【解答:②】
Ⅲー15
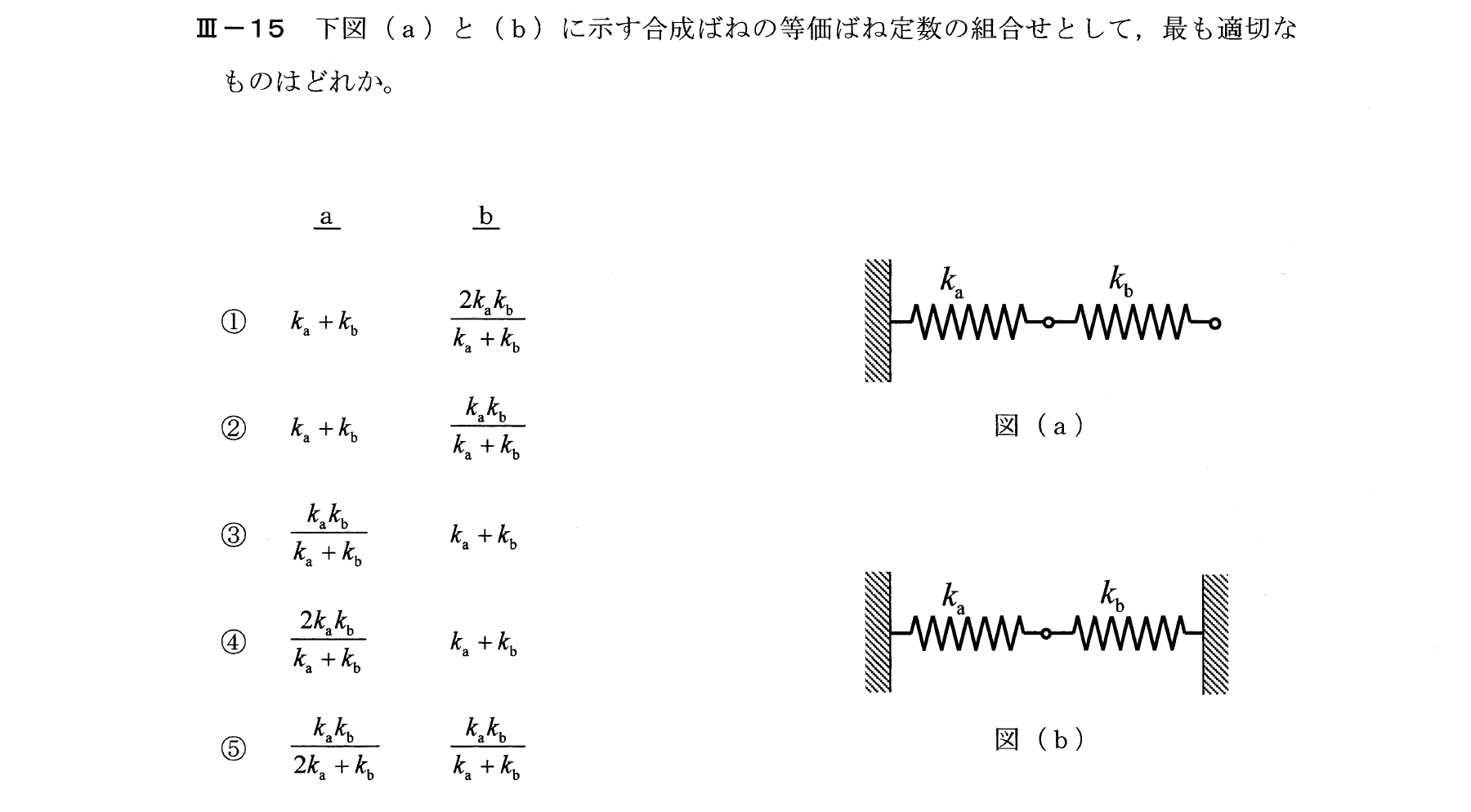
直列型と並列型(サンドイッチ型)の合成ばね定数である。
【解答:③】
Ⅲー16
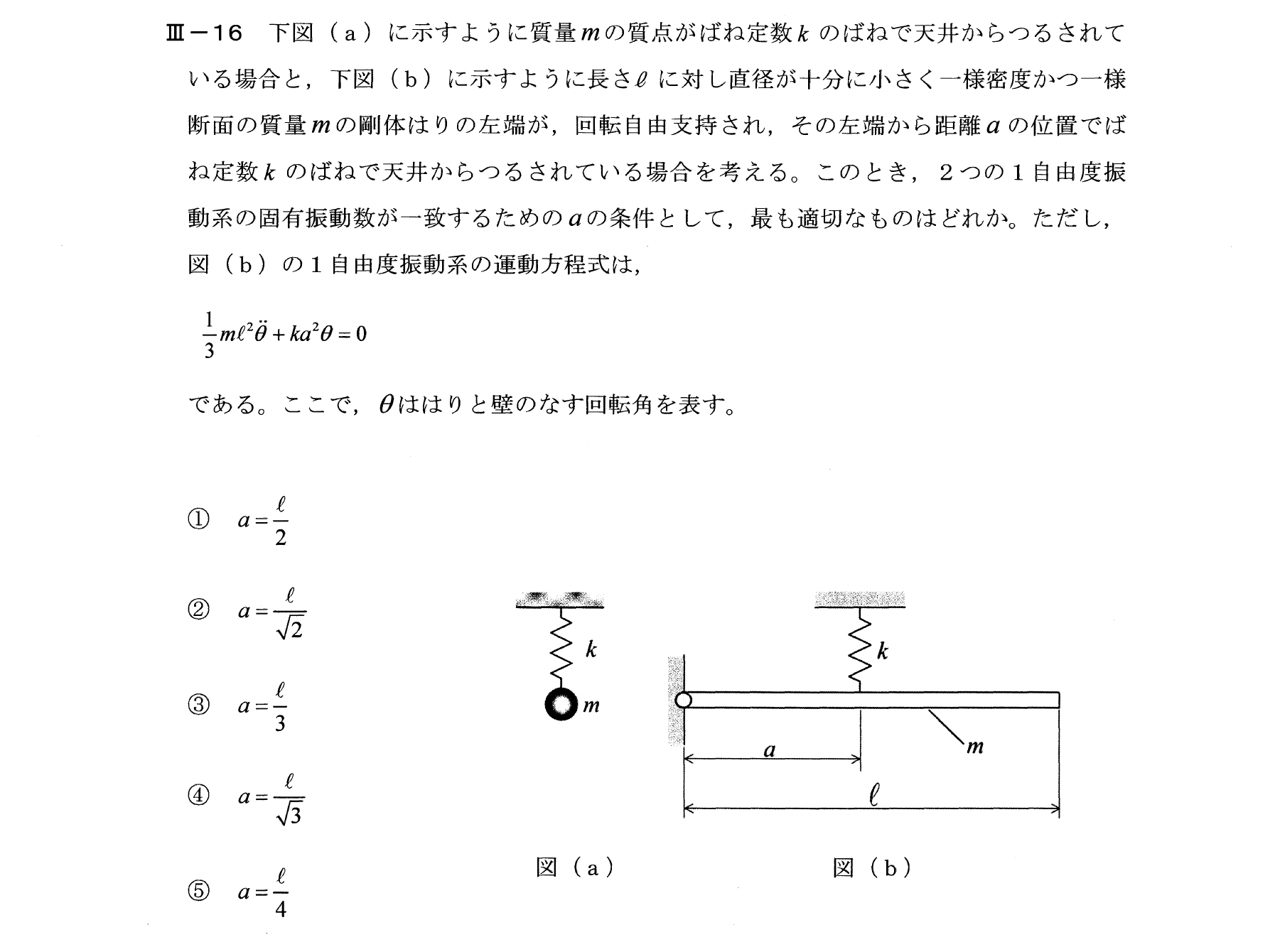
(a)の固有角振動数 \(\omega_{n}\)は次式となる。
$$\omega_{n}=\sqrt{{\frac{k}{m}}}$$
(b)の固有角振動数 \(\omega_{n}\)は次式となる。
$$\omega_{n}=\sqrt{{\frac{ka^2}{\frac{1}{3}ml^2}}}$$
これらが等しくなるので、\(a\) について式を整理する。
【解答:④】
Ⅲー17
Ⅲー18
Ⅲー19
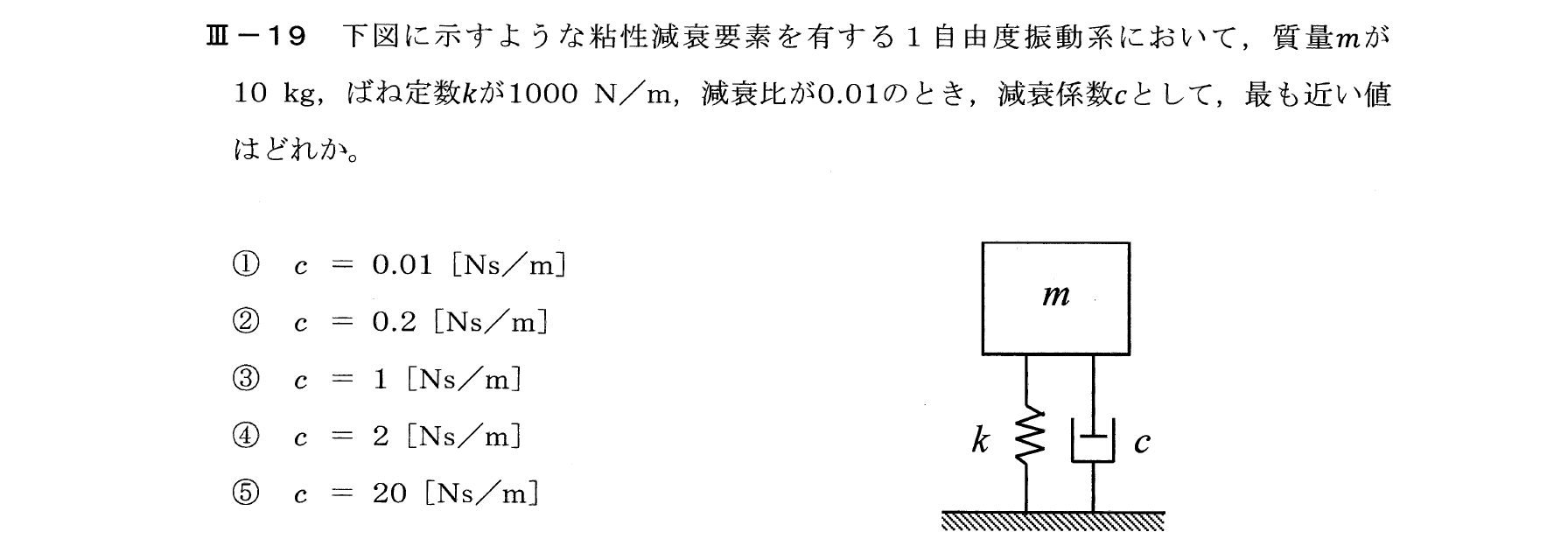
減衰比 \(\zeta\) は次式で表せる。
$$\zeta=\frac{c}{2\sqrt{mk}}$$
よって、\(c\) について式を整理して \(\zeta\) と \(m\) と \(k\) の値を代入する。
【解答:④】
Ⅲー20
Ⅲー21
覚える。
【解答:③】
Ⅲー22
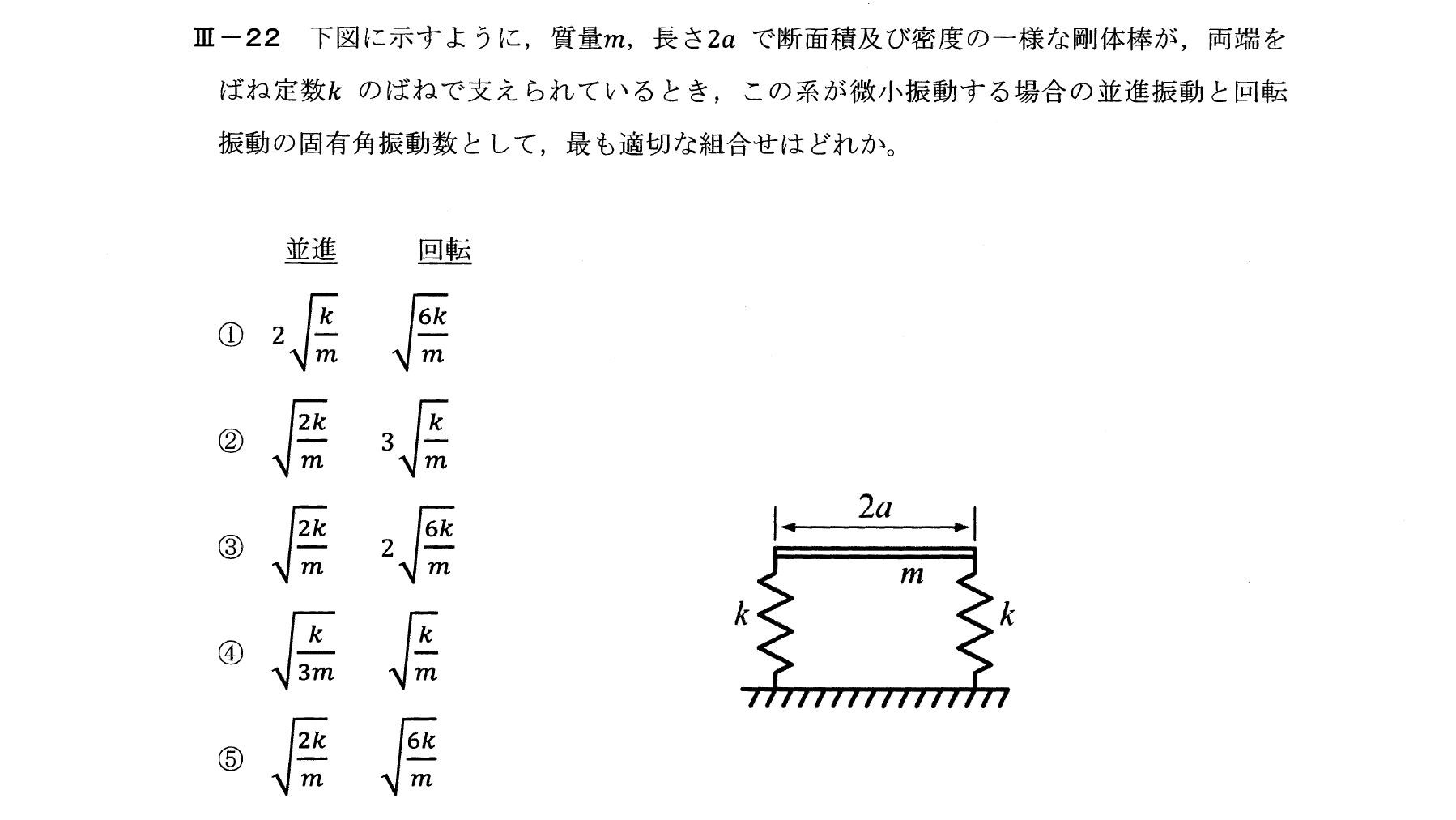
運動方程式は次式となる。
$$m\ddot{x}+2kx=0$$
よって、並進運動の固有角振動数 \(\omega_{n}\)は次式となる。
$$\omega_{n}=\sqrt{{\frac{2k}{m}}}$$
角運動方程式は次式となる。
$$I\ddot{\theta}+2ka^2\theta=0$$
ここで、 \(I\) は重心周りの慣性モーメントで、一様棒の場合は次式となる。
$$I=\frac{m(2a)^2}{12}$$
よって、回転運動の固有角振動数 \(\omega_{n}\)は次式となる。
$$\omega_{n}=\sqrt{{\frac{2ka^2}{\frac{1}{3}ma^2}}}=\sqrt{{\frac{6k}{m}}}$$
【解答:⑤】